
Our theme in the last couple of months has been vertical integration. Our original (pretty naive) assumption was that the massive expansion of activity in space had created a somewhat reliable base of components that we could use for missions. We knew that most of that was developed for low Earth orbit, but felt that this would be a good base to work from even if a deep space mission requires some additional performance.
What we found is that some components are there, including performance ratings in line with what we need. There are gaps for sure, which we knew and had already planned to develop and qualify on our own. We were looking to buy products 'off the shelf', but it turns out there really are no products and there is no shelf.
Vendors would provide price quotes for parts in their catalogue, generally already at a level that made no sense to us. When asking for an actual proposal, you find out that the price is not the price at all. Every proposal we receive has a line item sold as 'we need this to make sure your part meets all of your requirements' that is called NRE (non-recurring engineering). In most cases, this is the work that needs to be done to actually design and qualify the part or product that they are trying to sell you as though it already exists. And usually, NRE exceeds price by 2-3x....
Which brings us back to vertical integration. For every rabbit hole that we've gone down recently, it turns out that the individual inputs are available for a fraction (1/100 to 1/1000) of a 'price+NRE' proposal. This allows us to design and build ourselves, which helps drive down cost massively while ensuring that we control quality and performance.
A recent blog by Casey Handmer highlights some of these issues and challenges in the context of NASA and its prime contractors. Well worth a read!

After that rant about NRE, we wanted to jump to a more positive topic. The image above is from the Polaris Dawn mission that SpaceX was able to successfully run last month. A privately funded spacecraft with 4 astronauts in it hit the highest manned altitude since the Apollo program at 1,408 km above Earth's surface. They also completed an extravehicular activity (EVA) which frankly looks awesome.
High Frontier Mission Update
Our primary mission objective is:
To rendezvous with an uncharacterized near-Earth Asteroid and showcase capturing regolith at kilogram scale, minimizing mission duration and cost.
We remain on track for our scheduled launch in 2026 and are preparing for our preliminary design review (PDR) later in October. As we continue work on this mission which is intended to verify and stress test the performance of our mining technology, we have also started looking at our first customer missions after High Frontier.
Mission Design
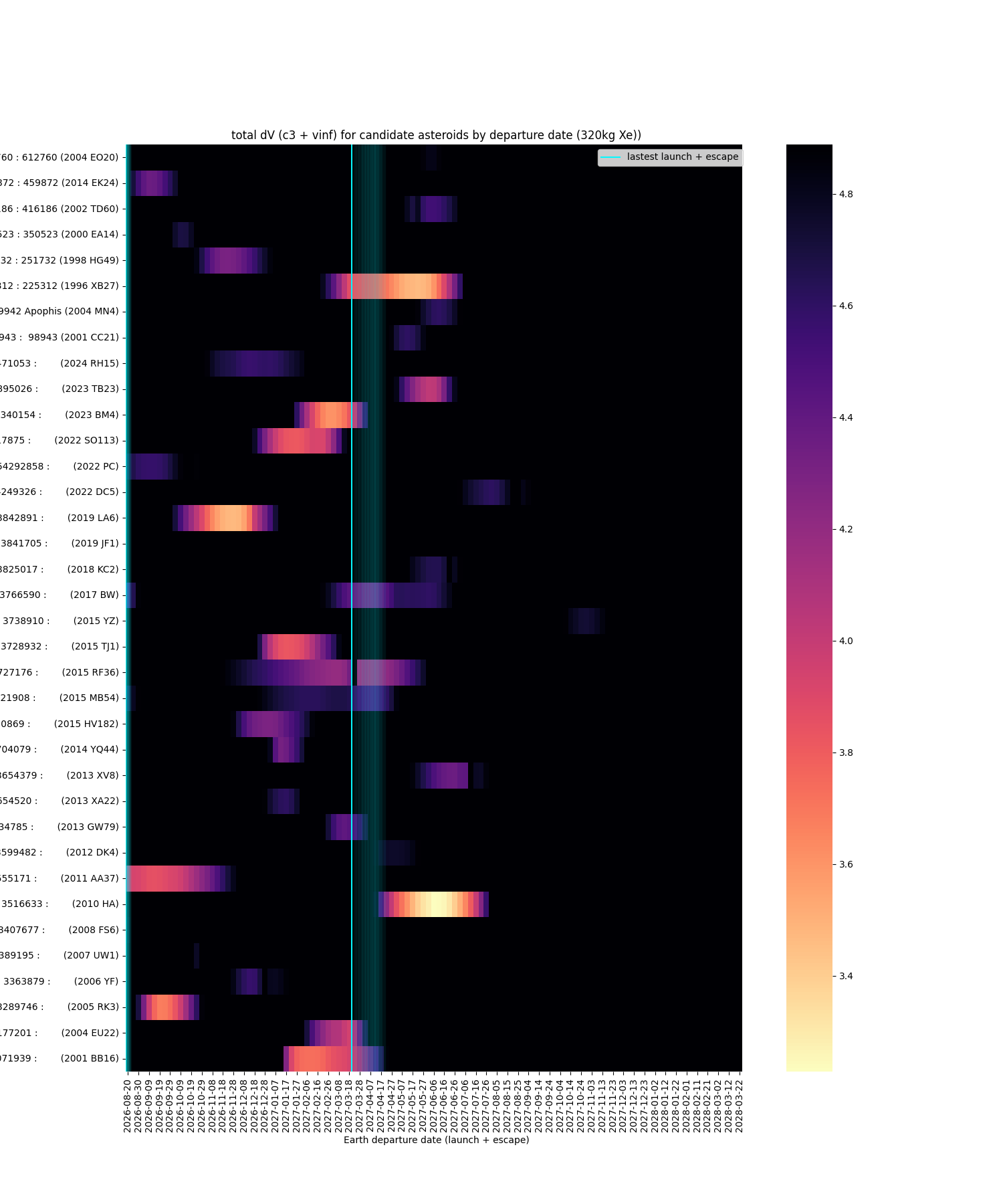
Our work on target selection and trajectory design is set up to create flexibility and a level of responsiveness that allows us to defer target selection until after launch. This flexibility is needed to ensure 2 things:
- We need to be launch-date agnostic -> Launches get delayed and pushed out all the time which makes a tight launch window a significant mission risk. Our approach as shown below provides us with a target envelope of asteroids that we can reach given certain launch dates and delta-v.
- We want the most attractive target -> New asteroids are detected on the order of about 10 per day and we know the total population contains many years of new discoveries. We want to target the most attractive target when we launch, not the most attractive one today.
The other big variable in mission planning is the orbit we launch to, with the graphs below showing the same spacecraft launched to LEO and to GTO. The LEO launch provides us with about 385 unique targets in the 2026-2027 timeframe. If we launch to GTO, the same spacecraft can reach 1,254 unique targets (based on today's dataset of asteroids).
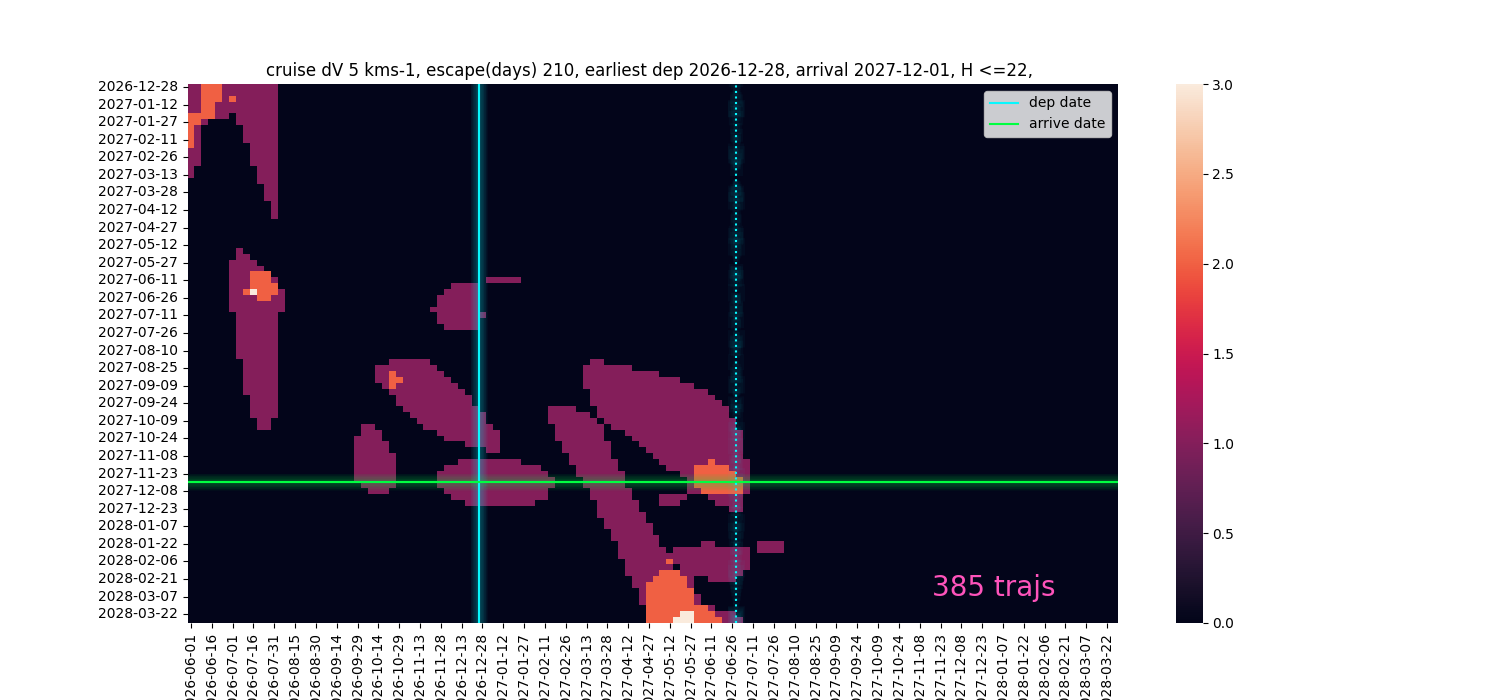
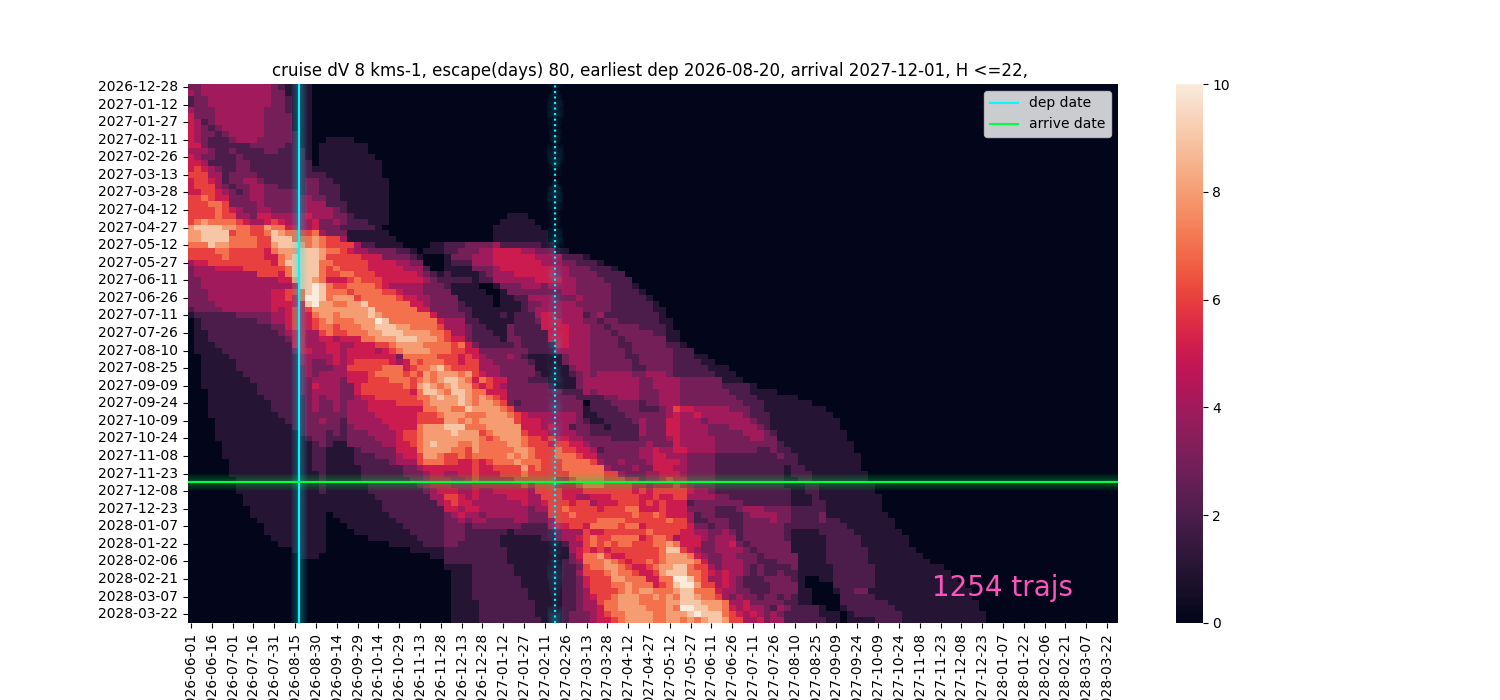
A GTO launch is significantly more expensive, but it provides a much larger set of targets as well as a shorter mission duration. While we only need 1 target for the mission, we do care about the relative quality and depth of data available (location, size, type, spin rate) as a risk indicator for the mission.
Spacecraft
The architecture and configuration for the spacecraft are entering a more stable state, with a dual solar array (changed from our prior mohawk configuration) that is tilted such that we have enough clearance to touch the asteroid without impacting the array or other sensitive equipment on the spacecraft.
The dual array simplifies our cruise phase because we can now align our primary Hall effect thruster with the center of mass, reducing swirl torque and making our flight out more fuel-efficient.
With avionics, communications equipment and excavation methods selected, we are moving forward with the full integration of these parts into a payload system that can be tested in more detail in the coming months.
Autonomy
Our simulations have been focused on the mapping and rendezvous phase, which we are going to run in a hybrid system for our first mission. We will be running these algorithms in shadow mode, while also downlinking all of the relevant data and images to ensure we can do our analysis and verification on the ground before we commit to the actual asteroid descent phase.
We have designed an optimized mapping phase (looking at distance to the asteroid, minimizing the number of images required for mapping to reduce downlink amounts and using the natural asteroid rotation for both the mapping campaign and the descent itself. The actual velocity of that descent will be measured in cm/second, after we matched the velocity of the asteroid itself as well as its rotation.
Our design goal here, using the onboard cameras and algorithms, is to hit a 10 cm target from a distance of 50,000,000 km.
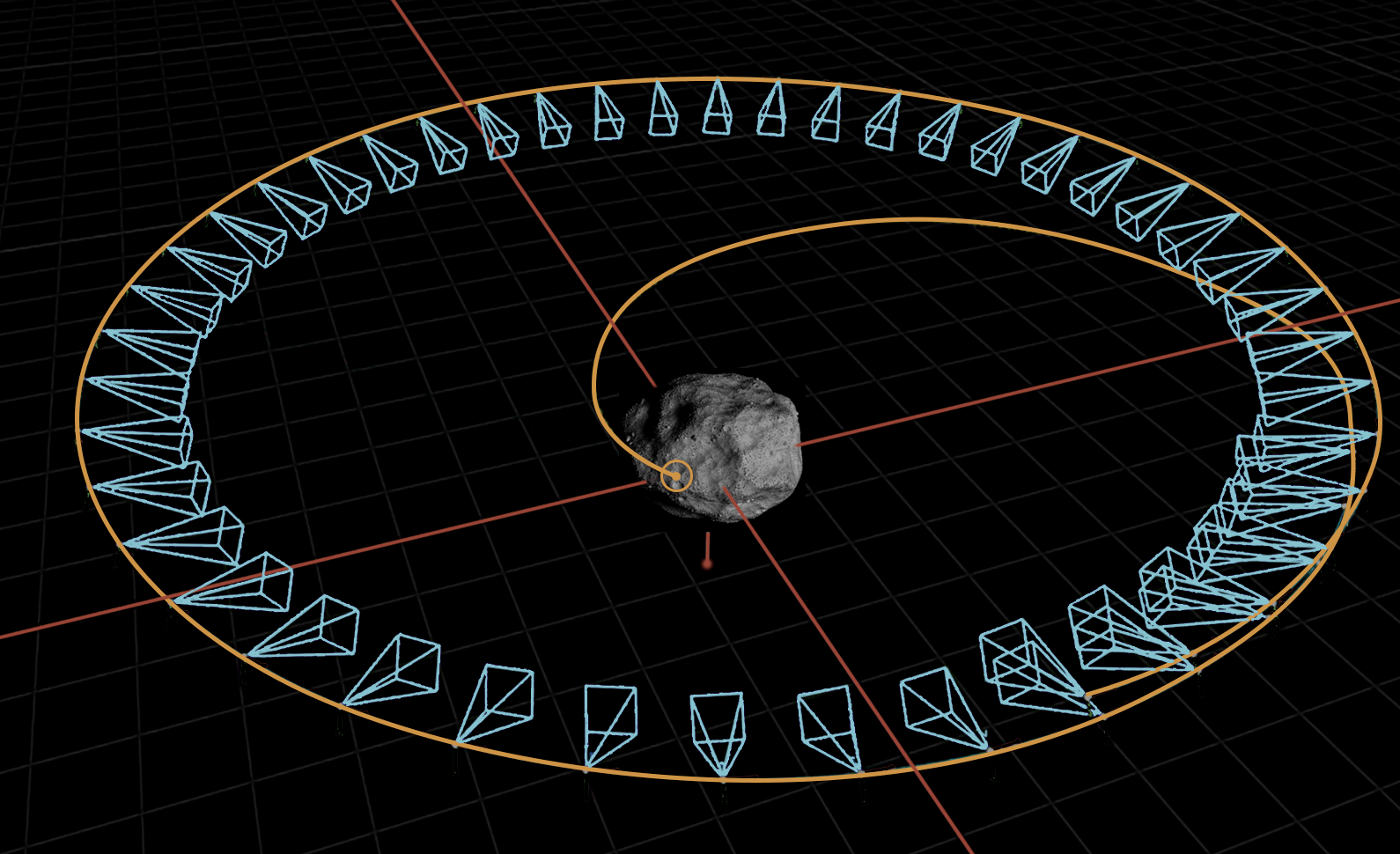
Simulation of asteroid descent down to Touch-and-Go (significantly accelerated)
Excavation
The excavation system was simplified last month by merging the functionality of 2 of the concepts we want to work with into one. The simple spacecraft overview shown below shows a layout with a telescoping arm for either excavation method.
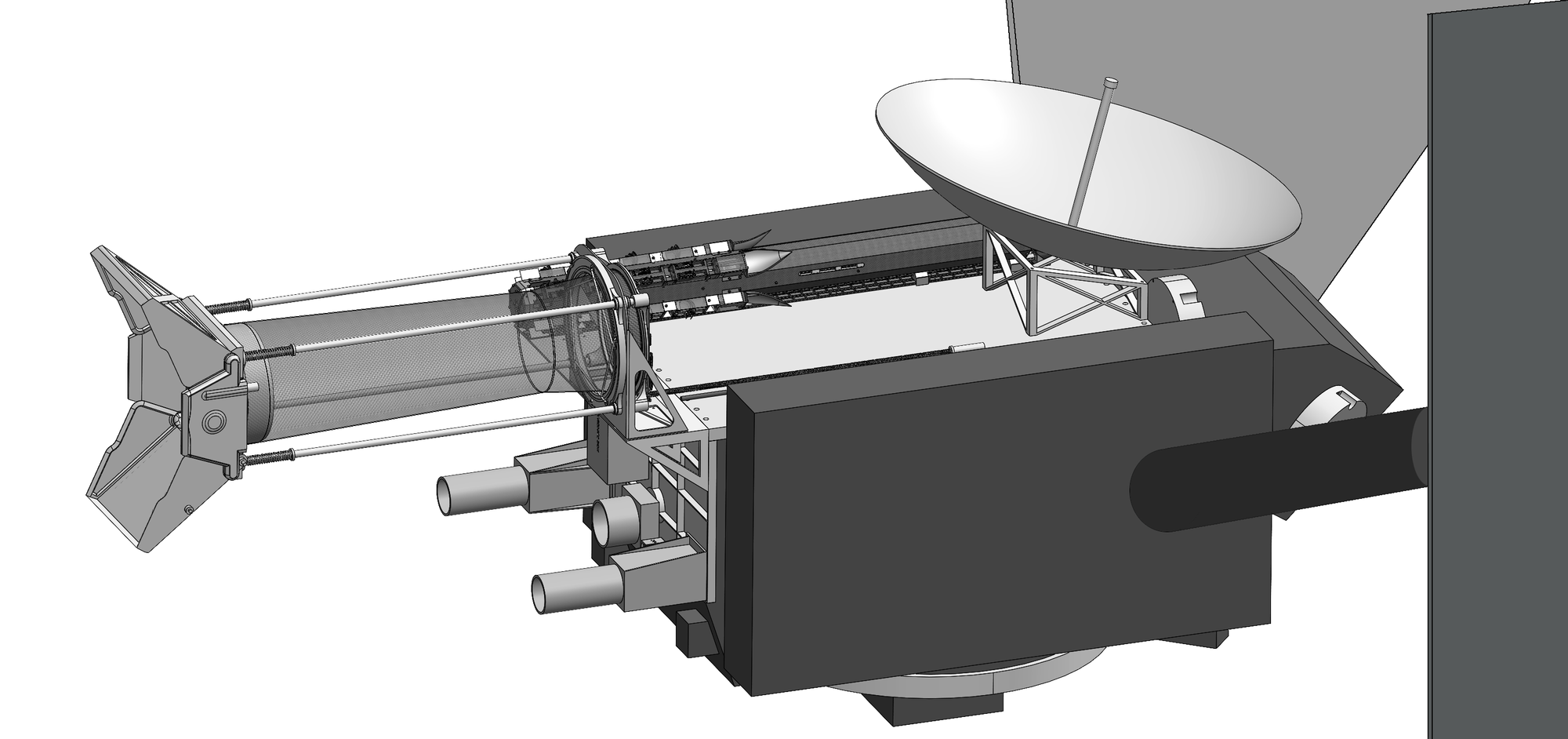
The 2 excavation archetypes that we are flying are:
- Pokeball, which is strong enough to chomp through asteroid rock but can also grab loose sand and pebbles if we encounter any.
- Socktopus, which will have fabric webbing between the arms to grab smaller pebbles and is designed to capture and grab an entire rock.
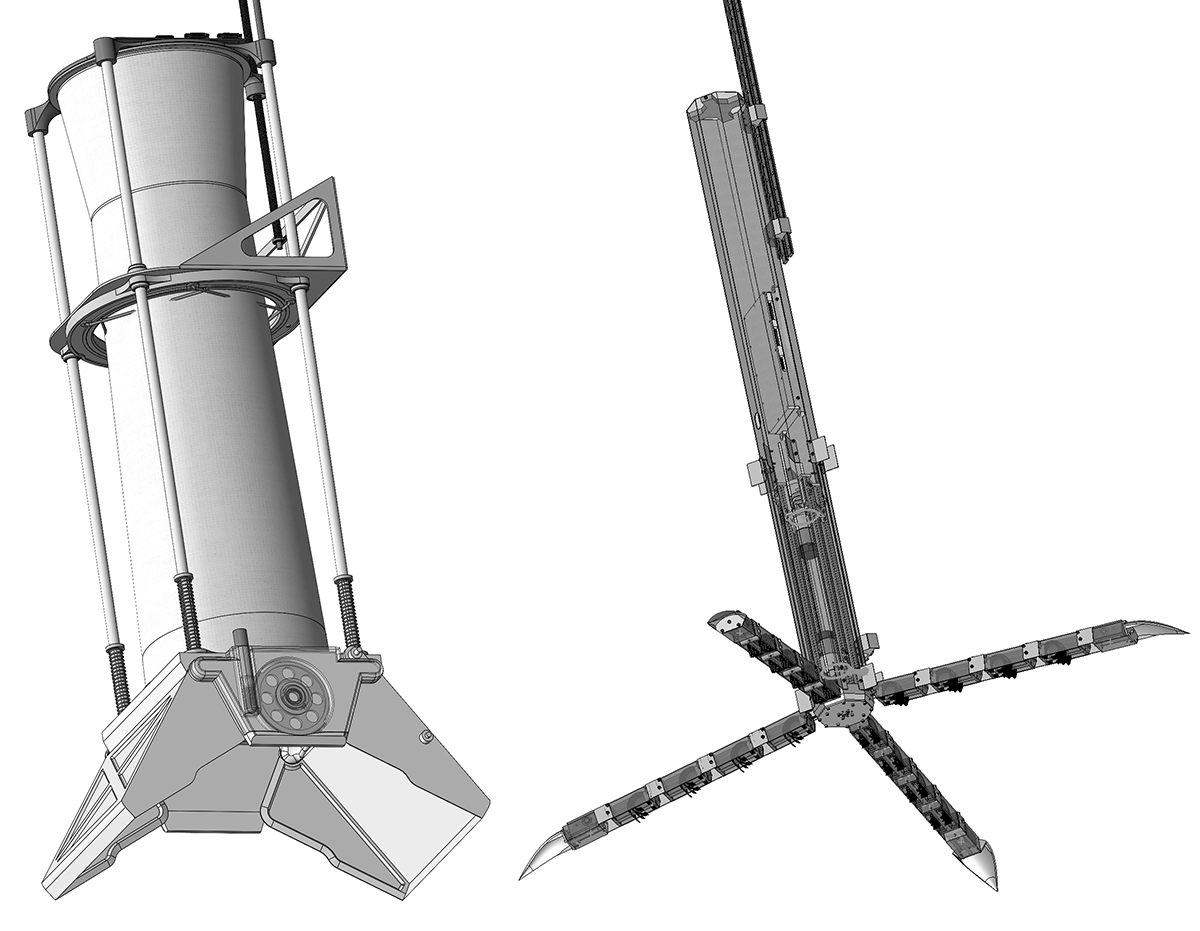
We intend to consolidate, compact, measure and test the regolith we excavate, integrated in Pokeball as our primary mining method.
Our Q3 2024 Goals
We completed most of our mission goals but failed to finish the first posts of 'Poor man's guide to deep space missions'. Some of the environment modeling work is spilling over into Q4.
Our Q4 2024 Goals
Thanks for joining us on this adventure!
The Karman+ Team


